MANİPÜLATÖR NEDİR?
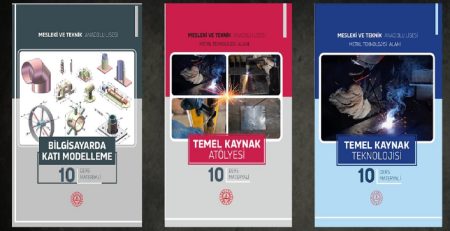
orbaylan2024-02-20T01:06:58+03:00Genel anlamda manipülatör deyince, asıl mekanik düzeni oluşturan robot kolu akla gelmektedir. Manipülatör Şekil de görüldüğü gibi, robotun kinematik
zincirini oluşturan ve sahip olduğu eksenleri doğrultusunda hareket etmeyi sağlayan birbirine bağlı çok sayıda hareketli aks ile birlikte ilgili mekanik ve
elektronik aksamın oluşturduğu robot kolu olarak ifade edilebilmektedir.
• Hareketli, birbirine zincirlenen,akslar üzerinden
bağlanan,sabit halkalardan oluşmaktadır.
• Her bir aksın hareketi, servo motorların hedefe yönelik
regülasyonuyla sağlanır.
• Bunlar redüksiyon dişlileri üzerinden manipülatörün
münferit bileşenlerine bağlıdır.
1 Manipülatör (robot mekanizmaları)
2 Kinematik zincirin başı :Robot ayağı (ROBROOT)
3 Kinematik zincirin serbest ucu:Flanş (FLANGE)
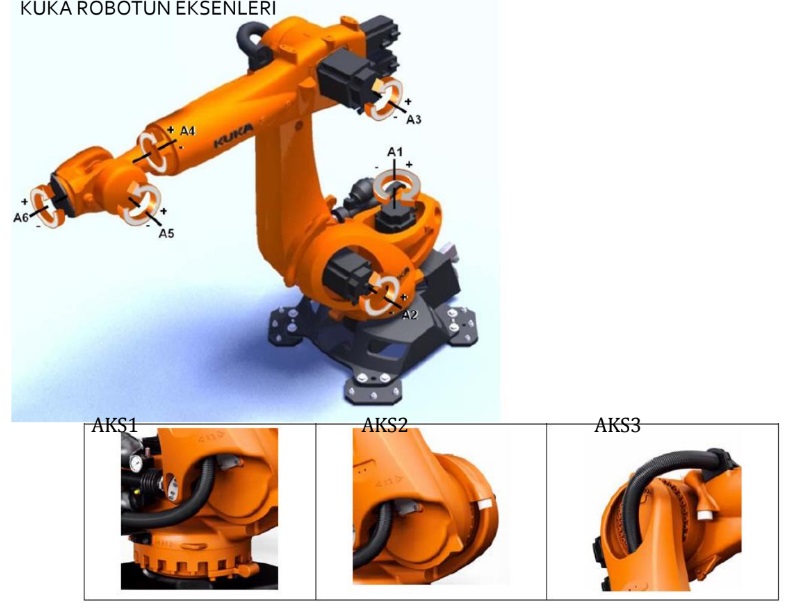
A1…….A6 Robot aksları
A1 –A2-A3 ANA EKSENLER
A4-A5-A6 BİLEK EKSENLERİ
Robot mekanik düzeninin bileşenleri çoğunlukla alüminyum ve çelik dökümden oluşur.Bazı durumlarda karbon elyaflı bileşenler kullanılmaktadır.
Manipülatör, eklemli ve hareket için robotun çalışmasına izin veren parçalardan oluşur. Manipülatör kolu yararlı bir iş sağlamak için çeşitli hareketler ile malzemeleri, parça, alet veya özel aygıtlara iş yaptırmada görev alır. Manipülatör, kaslari ve eklemleri insan kolunda bulunanlara benzeyen bir diziden oluşur. Eklemler, robotun iki farklı kısmını birbirine bağlar ve bunların birbirlerine göre hareket etmesine izin verir. Eklem doğrusal (düz çizgi) veya döner (dairesel) hareket sağlayabilir.
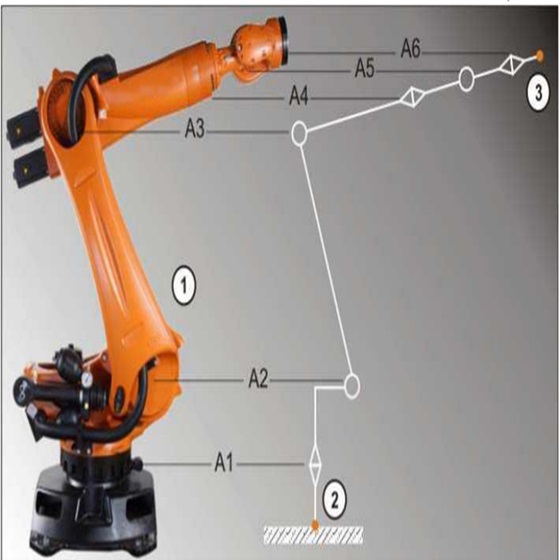
MANİPÜLATÖR'ÜN KISIMLARI
Robot, bir konuma yönlendirildiğinde kendi interpolasyonunu* kendisi hesaplayarak hangi ekseni, ne kadar, hangi açıda hareket ettireceğini hesaplar ve hareketi gerçekleştirir. * İnterpolasyon: Toplanan verilerin bir fonksiyon eğrisine uydurulması amacıyla kullanılmaktadır.
Robot kolları eklem ve hareketleri arasındaki ilişki, kinematik ile ifade edilir. Kinematik ileri ve ters yönlü olmak üzere iki çeşittir.
Kaynak robotlarında, manipülatörlerin taşıma kapasitesi, açısal hızı ve momenti etkileyen konulardan birisidir. Kaynak robotunun taşıma kapasitesini belirleyici olan taşıyacağı torç pakedinin ağırlığıdır. Uzun vadede farklı kaynak torç ve paketleri seçilecekse, bunlarda hesaba katılarak uygun değerli taşıma kapasiteli robota karar vermek gereklidir. Bir robot ne kadar fazla taşıma kapasitesine sahipse o derecede yavaş çalışır, enerji tüketir, yatırım ve bakım maliyeti artar